SIM: Fast Communication Mechanism
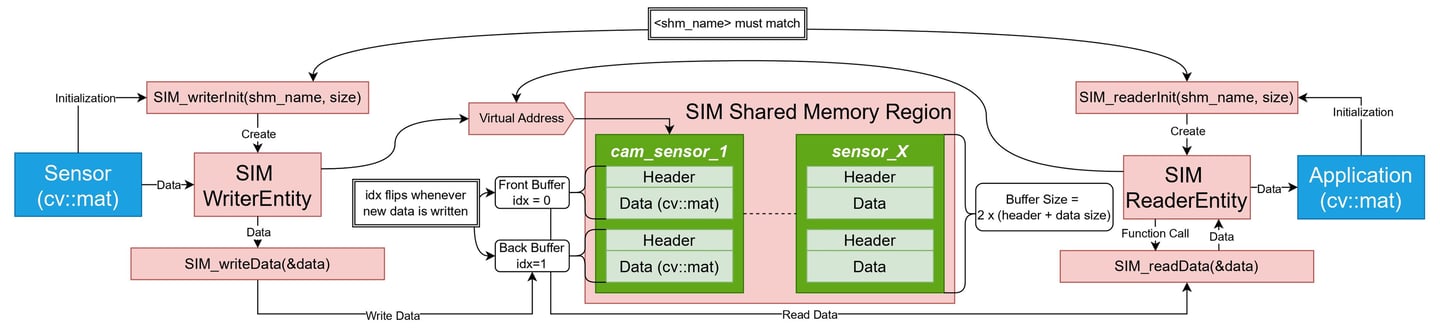

Fast data communication mechanisms in autonomous driving enable the real-time exchange of critical information, ensuring swift decision-making and precise vehicle control for safe and efficient operation.
Autonomous Vehicle Storage (AVS)
AVS is a storage system designed for autonomous vehicles, which aims to give a clear picture of the significant interactions between the environment and the autonomous driving system by storing a set of data.
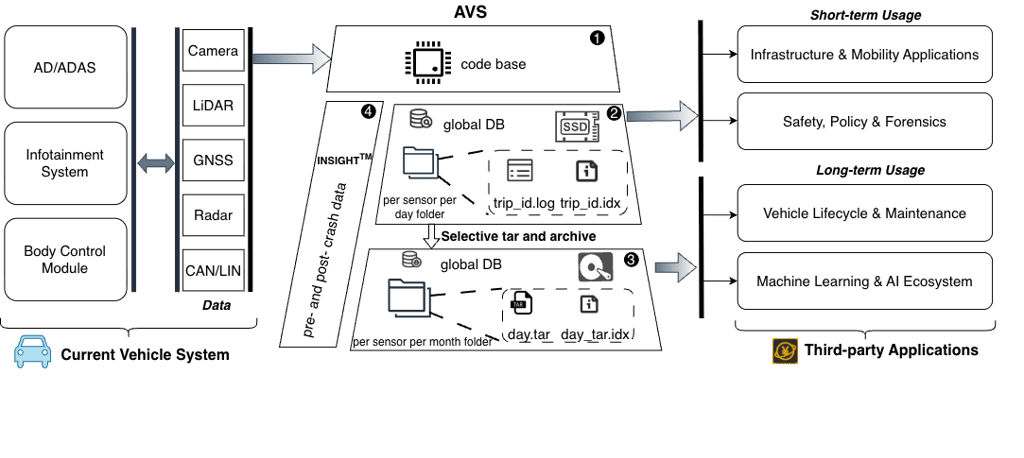
The two functions of AVS are:
Long-term Data Storage: This component will focus on storing large-scale, detailed data, including edge cases encountered by AVs, to improve algorithm and model performance over time.
Short-term Data Storage: Serving as a "Black Box" for vehicles, this function will store recent driving data, enabling accident analysis, assisting insurance companies, government authorities, and users in determining causes during incidents like crashes.
Vehicle Programming Interface (VPI)
A Vehicle Programming Interface (VPI) for autonomous vehicles is the ultimate bridge between software intelligence and machine control. From sensor fusion to real-time navigation and decision-making, VPI provides developers with a streamlined framework to unlock and orchestrate vehicle capabilities.
Contex-aware Risk Index (CRI)
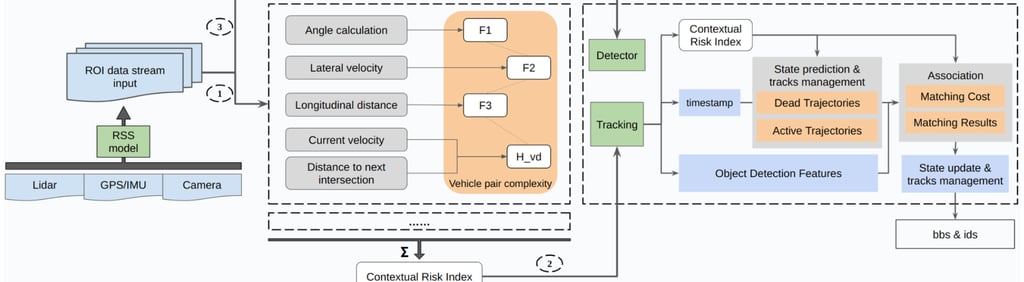
Safety Integration SafePilot leverages advanced Context-aware Risk Index (CRI) technology to revolutionize autonomous vehicle systems by dynamically influencing core modules across perception, decision-making, and storage. This safety-first operating system adapts in real-time to environmental complexities, ensuring optimized decision strategies, efficient data management, and enhanced situational awareness, delivering a groundbreaking level of safety and reliability in autonomous driving.
Real-time Scheduling
The DAVOS real-time scheduling project aims to realize a full-stack autonomous driving system that meets the real-time requirements of autonomous driving. The project consists of three main components:
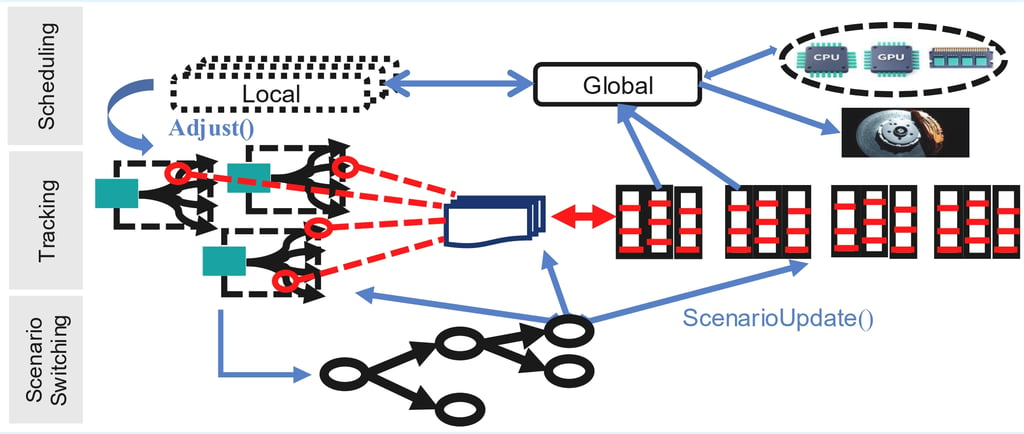
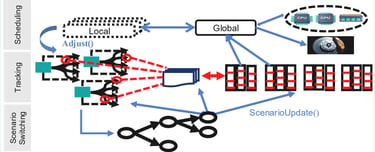
Redefining Real-Time Requirements for Autonomous Driving Systems: We delve into the specific real-time requirements of autonomous driving systems. By modeling autonomous driving systems and introducing new evaluation metrics, we refine the traditional real-time requirements for such systems.
Real-Time ROS Middleware: Guided by the theoretical work in the first component, we have undertaken real-time modifications to the existing ROS middleware. We define new scheduling units and implement multi-level scheduling to address the problem of excessively large scheduling sets in global schedulers.
End-to-End Real-Time Compensation Mechanism: Within scheduling units, we have designed and implemented an end-to-end real-time compensation mechanism. This mechanism comprehensively considers algorithm quality, communication quality, and actual requirements to achieve end-to-end real-time guarantees by dynamically adjusting resource allocation and application objectives.
Privacy-aware Confidential Computing (PaCC)
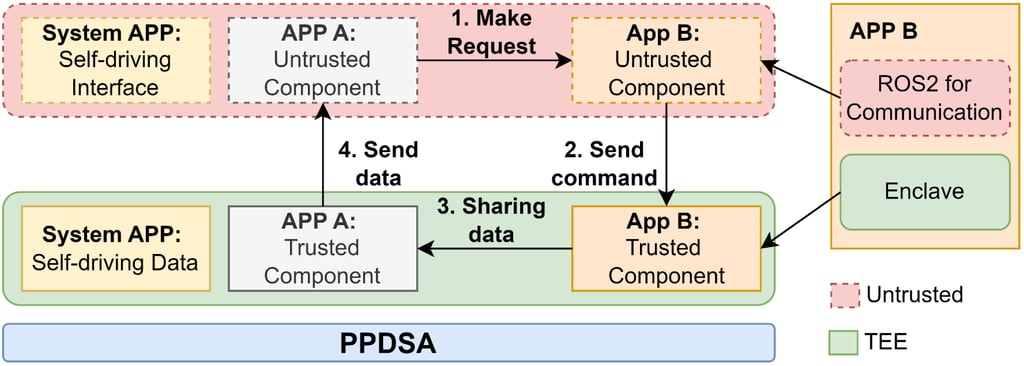
As Connected and Autonomous Vehicles (CAVs) are increasingly integrated into our transportation systems, they generate and exchange substantial amounts of data. This data includes not only details about the vehicle and road conditions but also private information about drivers and passengers, The exchange of this data can enhance data analytics and decision-making, leading to more effective driving. However, it also brings significant privacy concerns regarding personal data exposure, data misuse, and security risks. The benefits of data sharing and analytics in CAVs would not persist, without strong safeguards that protect privacy. In Davos,an innovative integrated and comprehensive framework which can enable privacy-preserving data sharing and analytics among Connected and Autonomous Vehicles (CAVs.)